
近日,中国科学院深圳先进技术研究院集成所智能仿生中心曹武警副研究员与香港中文大学、上海交通大学、东北大学科研团队合作,在外骨骼机器人领域取得新进展。
团队研发了国际首款面向横向行走步态的外骨骼,通过在横向行走时施加主动阻力力矩代替弹力带被动力矩,实现髋关节外展肌肉的精准高效锻炼,为抗阻横向行走锻炼提供了智能化新方法。研究成果以Development and Evaluation of a Hip Exoskeleton for Lateral Resistance Walk Exercise为题,发表在机电一体化领域顶级期刊IEEE/ASME Transactions on Mechatronics(JCR一区,影响因子:6.4)曹武警副研究员为第一作者,吴新宇研究员为通讯作者,中国科学院深圳先进技术研究院为第一单位。
髋外展肌肉肌力下降会导致骨盆平衡失调,引起髋部疼痛,并出现腰痛和膝关节痛等症状。抗阻横向行走是髋关节外展肌锻炼增强的重要方式,弹力带横向行走是抗阻锻炼增强髋关节外展肌最常用的康复运动之一。然而,弹力带横向行走锻炼有以下缺陷:在横向行走过程中,阻力不能主动调整,即锻炼强度不受控;锻炼肌肉受姿势、弹力带位置影响,阻力作用的步态相位时段不可控,即锻炼肌肉不精准;且当弹力带穿戴时,前行会受影响,即锻炼与自由前行不可兼得。当前研发的外骨骼都是针对直行步态,横向行走步态与直行步态完全不同,尚无外骨骼可以直接应用于抗阻横向行走锻炼解决上述问题。
团队研发了国际首款抗阻横向行走锻炼外骨骼,提出了自动适应不同身高与体重的多连杆机构构型,建立了考虑传递柔性与非线性摩擦力矩的外骨骼与人体耦合系统动力学模型,提出了阻力力矩模糊整定PID控制策略,通过穿戴测试实现了臀中肌与阔筋膜张肌肌肉激活度的提高。
为了验证所提控制策略的有效性,分别采用传统PID和模糊整定PID控制策略对外骨骼进行了力矩跟踪实验。结果表明所提出的模糊整定控制策略可以实现对阻力力矩的稳定跟踪,跟踪误差较小且具有更短的调整时间。
为了验证外骨骼对髋关节外展肌肉的锻炼效果,比较了不穿外骨骼、穿外骨骼不开电、弹力带和外骨骼主动抗阻(10、15、20 Nm)条件下臀中肌与阔筋膜张肌的肌肉激活度,结果表明:所提出的髋关节外骨骼在主动抗阻(10Nm)条件下,相比无外骨骼横向行走,臀中肌肌肉激活度增加约6倍,阔筋膜张肌激活度增加约16倍。
此外,团队基于肌电的横向行走步态识别研究Gait Recognition Based On sEMG And Deep Residual Shrinkage Network在国际机器人领域知名会议IEEE International Conference on Real-time Computing and Robotics (IEEE RCAR 2023)上获得最佳学生论文奖。团队硕士研究生罗明祥为第一作者,吴新宇研究员与曹武警副研究员共同指导学生完成。
该系列研究工作得到了国家自然科学基金杰出青年基金项目、中国科协青年人才托举工程项目、国家自然科学基金深圳联合基金重点项目、国家自然科学基金青年项目、深圳市自然科学基金面上项目等项目资助。
外骨骼代替弹力带实现智能精准抗阻横向行走锻炼
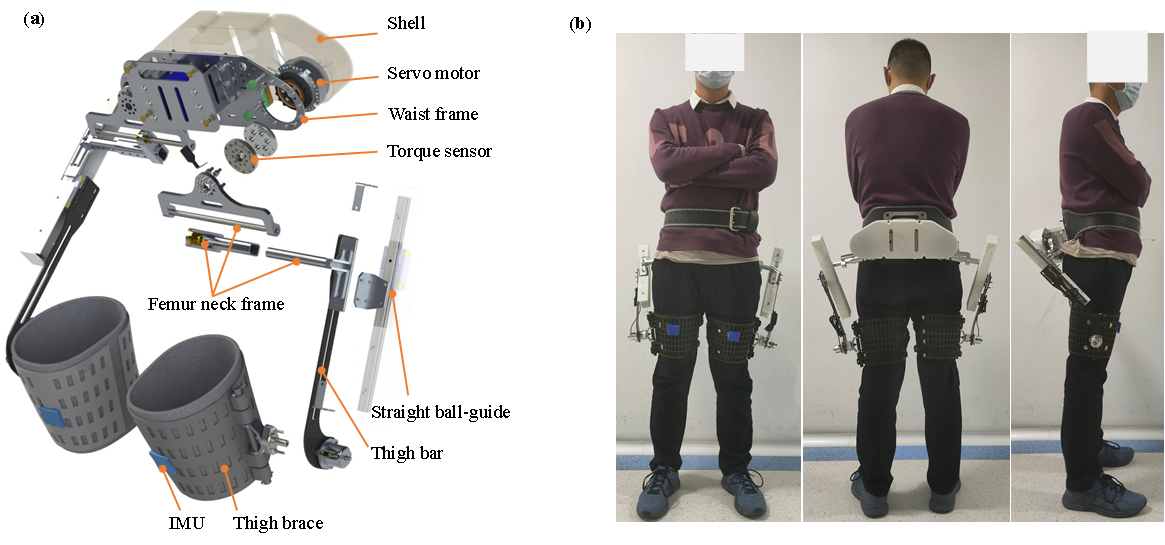
抗阻横向行走锻炼外骨骼系统及穿戴示意图
髋关节外骨骼控制框图
不同控制策略下力矩跟踪效果
不同横向行走条件下臀中肌和阔筋膜张肌的肌肉激活度
IEEE RCAR 2023最佳学生论文奖证书
附件下载: