
自然界中,细菌、精子和一些微生物使用它们纳米级的弹性菌丝进行传感、驱动和捕食。它们的力感知灵敏度可以达到纳牛乃至皮牛级别。这些微生物和细胞的生物力学特性令人着迷,长久以来人们梦想着制造出如此精巧的仿生弹性器件,以便能够对微生物进行精确的细胞力学表征和更进一步地随心所欲操纵。
1月4日,中国科学院深圳先进技术研究院的徐海峰团队通过开发超弹磁性光刻胶,构建了包含弹性编程在内的弹性体4D纳米光刻技术,制备了迄今最灵敏的人造弹簧系统——皮牛弹簧(picospring)。该系统具有纳米级的特征尺寸和500飞牛级别(500 fN)的超低力灵敏度,相当于单个细胞重力的一千分之一,并且应变精度超过1 m/pN。皮牛弹簧支持高度自由的3D光刻加工,可以被定制化加工成任意形状,同时完美兼容磁性光刻材料,因此可用于制备各类软体微米机器人和柔性微米器件,如用于测量精子驱动力的微米测力计、用于细胞操纵的微米镊子以及进行自驱动的微米企鹅和微米海龟等机器。 该文章发表在微纳器件领域顶级杂志Nature Nanotechnology,徐海峰为论文的独立一作及共同通讯作者。中国科学院深圳先进技术研究院为论文第一单位,合作单位为德国莱布尼茨固态与材料研究所与开姆尼茨工业大学。深圳先进院王磊研究员亦为该文章作者之一。
弹簧是人类认识的最早的能量转换器件。小至钟表、扭秤,大至汽车悬挂、原子力显微镜,无一不是使用弹簧机构作为其关键部件而来。可以说弹簧丰富了人造机械的多样性。在微观世界中,细胞和微生物也使用弹性机构来执行力感知、捕食、驱动等动作。把弹簧的应用推广到微观世界,而发明出具备弹簧机构的微纳器件是人类长久以来的一大构想。虽然弹簧的应用历史悠久,但能应用于细胞力学的大应变微米弹性器件却面临挑战。其关键困难在于细胞相容性弹性材料的高精度3D加工。此前,徐海峰团队分别开发了弹簧触发的抗癌精子机器人以及抗血栓的精子火车机器人。研究发表在ACS Nano和Angewandte Chemie等顶级期刊,被Science、MIT Technology Review、美国国家广播电视等多家期刊和媒体报道(链接见文末)。但前期的微米机器人的力感知精度较差,且无法达成细胞的自由操纵。
在此背景下,徐海峰团队开发出世界首个纳米加工精度的弹性体光刻胶,构建了包含弹性模量在内的弹性体4D光刻策略,用以定制化加工软体微米机器人,并展示了不同机器人的多种应用。(1)微米测力计可对皮牛级细胞力产生微米级的响应,可以用来测量包括精子在内的物理、化学和生物复合等各类微米机器人的泳动力。(2)微米夹持器可以被磁场独立控制,实现包括夹持在内的8个自由度运动。通过编程磁场模式,可以实现微米机器人翻滚、旋转、夹持、释放等多模态运动的解耦控制,针对特定目标物,如活体细胞进行夹持和转运。该过程不涉及任何如光、热、离子或pH等细胞敏感的环境变化,真正实现了细胞的无影响操纵。(3)仿生软体微米机器人具有集成的弹簧组。通过弹簧对磁场能量的储存和编程释放,实现了仅有磁场控制的20微米尺寸的微企鹅和微海龟的软体驱动。
该研究开创了软体机器人在细胞力学及细胞操纵等领域的应用范畴,为构建新型的细胞力学研究平台和细胞操纵分选平台提供了技术基础。它为细胞水平的非侵入性操纵开辟了途径,为显微外科手术和靶向药物输送领域提供了新方法。 未来,新型微创甚至无创软体微米机器人仪器将为细胞力学研究、体内受精以及小腔道内血栓清除和神经干预等医疗任务提供有效助力。
4D纳米弹性体光刻策略制备各类软体微米机器人的示意图
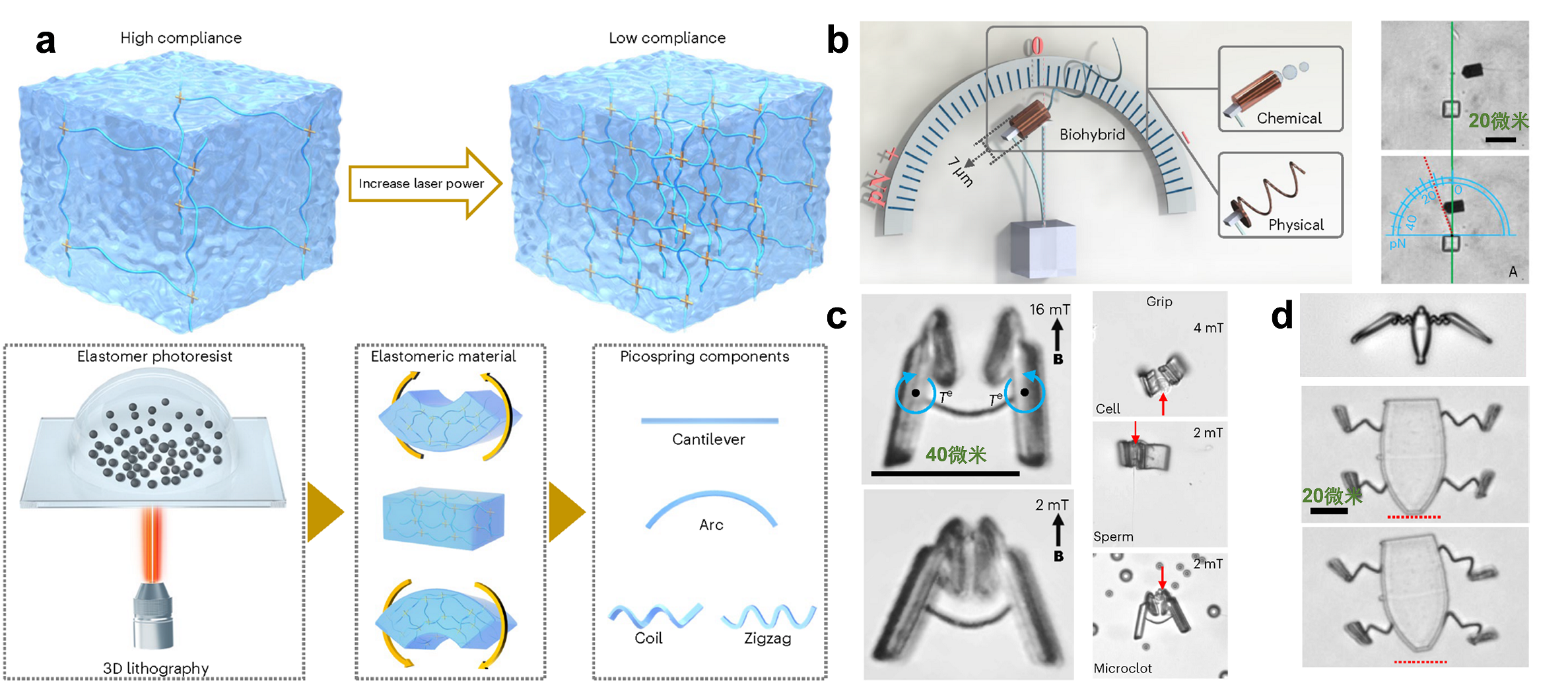
皮牛级软体微米机器人的加工与应用。(a)弹性编程的4D纳米光刻技术用于微米机器人的加工。(b)皮牛级微米测力计用于细胞力学研究。(c)皮牛级微米镊子用于多种不同形状细胞的无干扰操纵。(d)皮牛级磁驱微米企鹅和微米海龟。
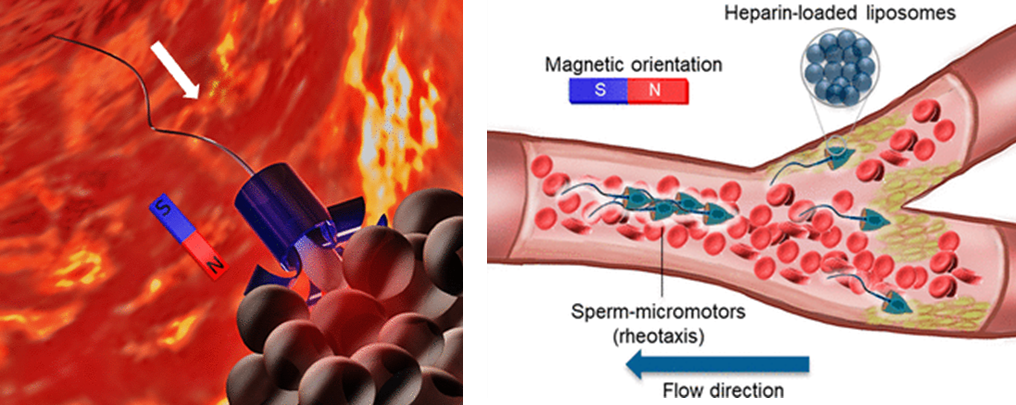
徐海峰开发的两种精子机器人:抗癌四足精子机器人(左)和抗血栓精子火车机器人(右)。
文章链接:https://www.nature.com/articles/s41565-023-01567-0
相关链接:
https://pubs.acs.org/doi/full/10.1021/acsnano.7b06398
https://pubs.acs.org/doi/abs/10.1021/acsnano.9b07851
https://onlinelibrary.wiley.com/doi/full/10.1002/anie.202005657
附件下载: