
在相同磁场下,协同控制多个磁驱动微型机器人编队运动是困难的,因为输入的磁场控制变量远小于协同控制多机器人编队位置与队形的输出自由度,导致了系统严重欠驱动。
近日,中国科学院深圳先进技术研究院集成所智能仿生中心团队针对控制系统欠驱动问题,提出了一种基于改进领航-跟随法的多磁驱动微型机器人编队控制方法,首次实现了2个和3个磁性软体微型机器人的编队自主导航和路径跟随控制。研究成果以Leader–Follower Formation Control of Magnetically Actuated Millirobots for Automatic Navigation为题,发表在机电工程论域权威期刊IEEE/ASME Transactions on Mechatronics (JCR一区,影响因子:6.4)。智能仿生中心徐天添课题组博士研究生黄晨阳为第一作者,徐天添研究员为通讯作者。
多个微型机器人可以协同执行单个机器人无法完成的复杂任务,从而增加系统的冗余度和扩展性,提高任务的执行效率。然而,不同于传统多机器人系统中每个智能体可以独立驱动,由外界全局磁场驱动的微型机器人接收到相同磁场,从而造成耦合的运动速度。协同控制多个具有耦合速度的磁驱动微型机器人编队运动将导致了系统严重欠驱动,因为输入的磁场控制变量远小于协同控制多机器人编队位置与队形的输出自由度。
研究团队提出一种多磁驱动微型机器人全自动编队导航控制框架,包括了基于增强RRT*编队路径与队形规划单元、基于改进虚拟领航-跟随法的多磁驱动微型机器人协作控制单元和电磁驱动单元。规划单元中,提出的基于增强RRT*路径规划算法综合考虑了避碰、路径长度、搜索效率和电磁场分布特性,与其他RRT*及衍生算法相比,规划路径更趋向于电磁均匀分布区域。协作控制单元中包含一个具有扩展状态观测器的无模型跟随者控制器,应用于编队队形控制;一个基于模糊逻辑的领导者控制器,用于编队路径跟随控制;一个基于耦合速度的协作控制器,用于控制多机器人的速度状态。
通过实验验证了由2个磁驱动微型机器人组成的编队可以在保持编队队形约束下和变换编队队形约束下,实现高精度鲁棒的路径跟踪控制。此外,由3个磁驱动微型机器人组成的编队,可以通过自主队形变换实现穿越狭窄障碍通道。最后,多机器人编队通过提出的优化路径与队形规划算法,以及编队协作控制方法,实现了障碍物区域自主避障和路径跟踪。本研究成果为多磁驱动微型机器人编队控制提供了新理论。在未来的工作中,我们期望通过提出的策略,多微型机器人团队将能够高效地协同工作,用于体内靶向药物递送、传感和微组装应用。
该系列研究工作得到了国家重点研发计划、国家自然基金、广东省、中科院青促会、深圳市等科技项目资助。
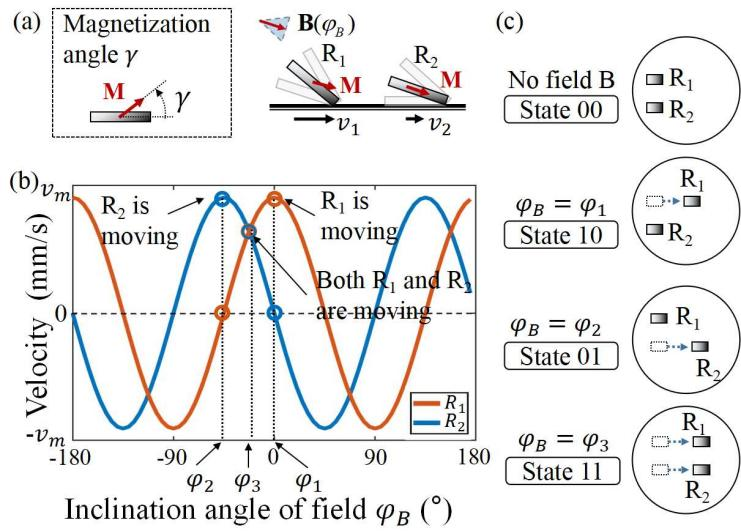
图1:两个磁化异构的微型机器人具有耦合运动速度
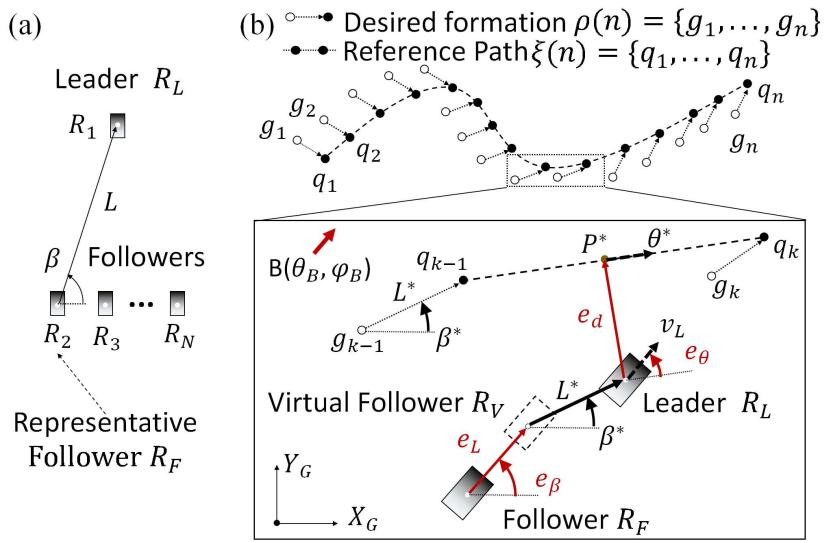
图2:多磁驱动微型机器人编队控制问题描述
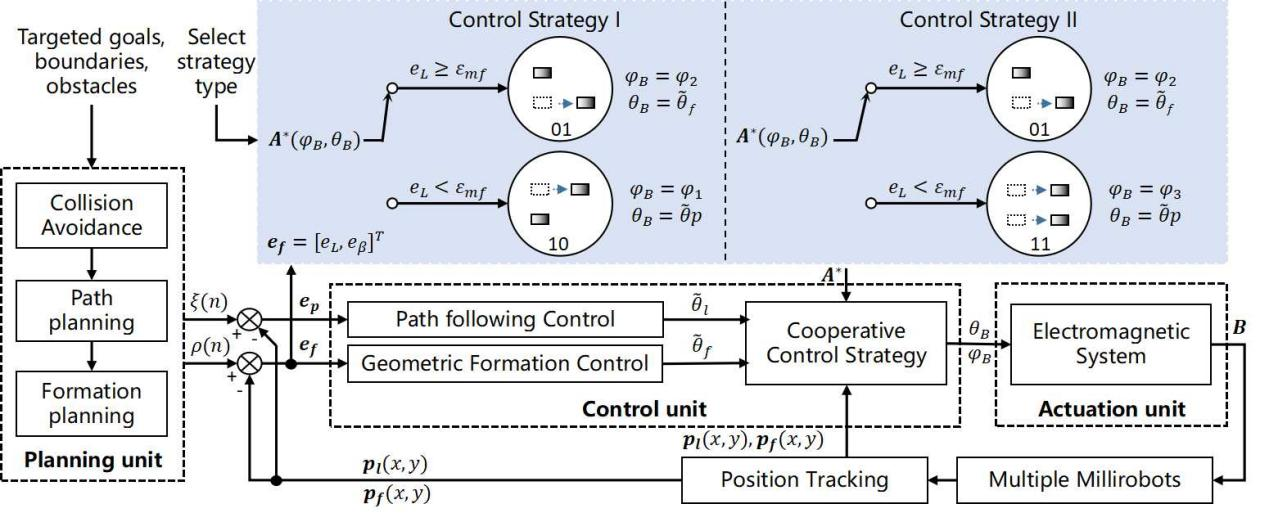
图3:多磁驱动微型机器人编队控制框架
附件下载: